.jpg)
.jpg)
.jpg)




Категория: Инструкции
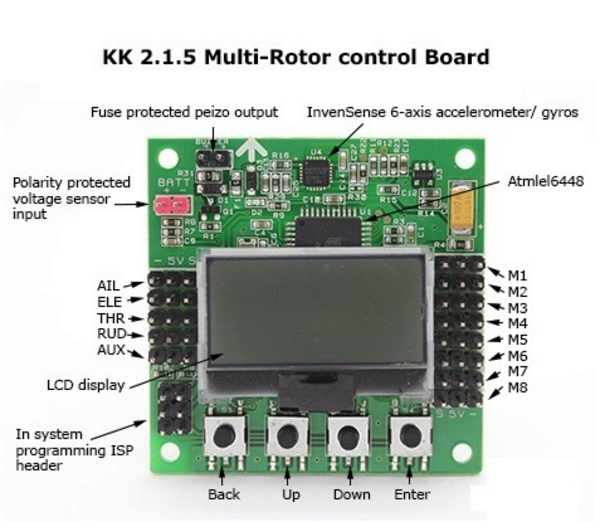
Мы уже писали про контролер полетов KK Multicopter. в этой статье мы рассмотрим расширенную версию этого контроллера для квадрокоптера.
KK Multicopter - это очень удачный и не дорого контроллер полетов для мультироторных радиоуправляемых летательных аппаратов. Он поддерживает до 8 моторов и легко настраивается.
Предназначение этого контроллера - небольшие гоночные и акробатические квадрокоптеры и различные мультироторные летающие лаборатории.
В первом случае - потому, что обычно в таком типе летательных аппаратов ничего кроме гироскопов не используется, дабы не мешать пилоту исполнять трюки и входить в повороты, а во втором случае - не рисковать дорогим контроллером при доводке рамы и обвеса.
Все рассмотренные ниже варианты плат контроллеров полета прошиваются одинаковой прошивкой и поддерживают следующие варианты летательных аппаратов.
Бикоптер
Трикоптер
Квадрокоптеры +, X
Гексакоптеры +, X, Y6, H6
Октокоптеры +, X, +8, X8, H8, V8, V6
Самолет с 1 сервомашинкой на элерон
Самолет с 2 сервомашинками на элерон
Летающее крыло
Монокоптер 2 мотора, 2 сервомашинки
Монокоптер 1 мотор, 4 сервомашинки
Как видите - можно использовать не только для полетов на мультикоптере, но и установить на радиоуправляемую модель самолета.
Теперь перейдет собственно к самим контроллерам KK Multicopter с экраном, я располагаю их по возрастанию цены.
KK2.15 Mini Version Flight Controller Atmega644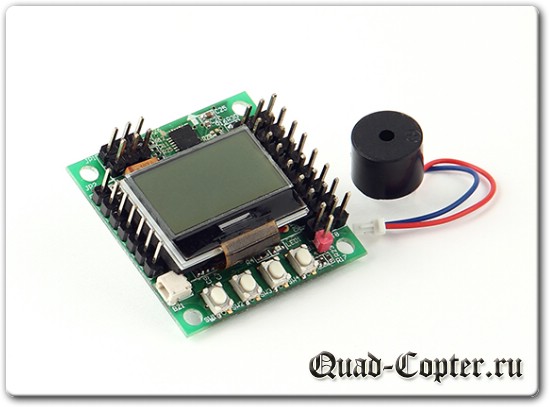
Достоинством этой платы является уменьшенный размер платы: 24х18 мм.
Однако, подключение приемника потребует доработки проводов. Обычно, уменьшение размера платы на сантиметр по длине и ширине не критично.
Вот как выглядит KK2.15 Mini установленный на квадрокоптере.
Следующий по цене контроллер имеет особенность - увеличенный экран, что позволяет гораздо проще настраивать полетные режимы.
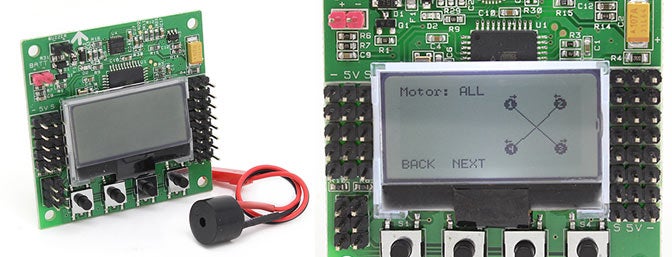
KK2.1.5 KK21EVO Flight Controller With Large LCD Second MPU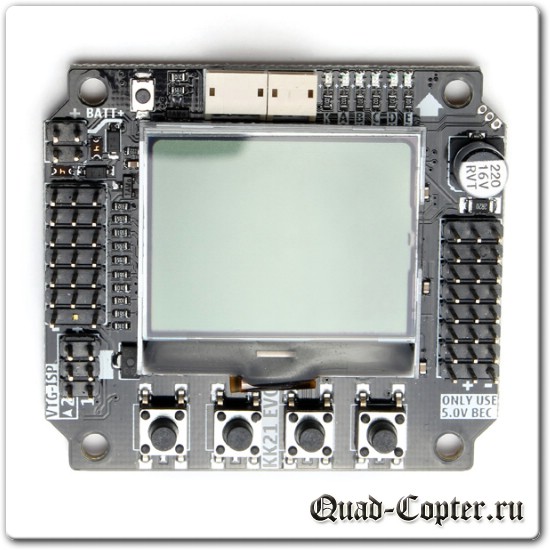
Хотя экран на контроллере мультикоптера используется только при выборе конфигурации и в первых полетах, тем не менее - больший по размерам экранчик позволяет настраивать полетный контроллер с большим удобством.
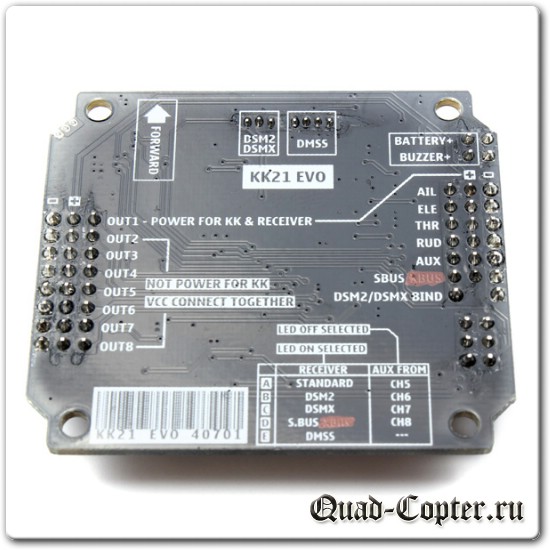
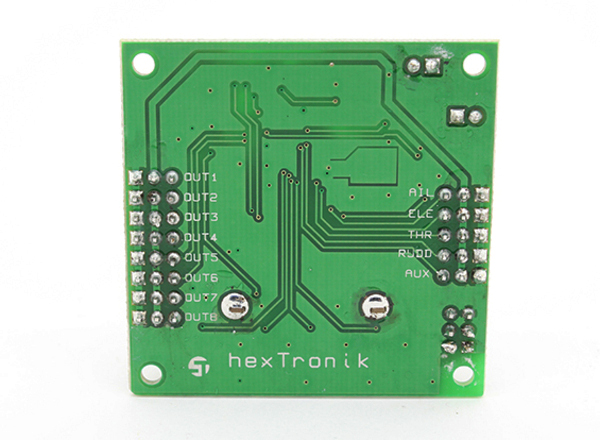
Раскладка подключений подписана на обратной стороне контроллера полета, так что ошибиться можно только преднамеренно.
Надо сказать, из всех контроллеров KK Multicopter с экраном - этот самый новый по разработке и изготовлению, но, тем не менее полностью совместим по прошивке со старыми версиями.
Если вы еще не выбрали какой именно КК контроллер брать - то я рекомендую именно его!
Купить KK2.1.5 KK21EVO Flight Controller можно тут .Третий KK Multicopter с экраном - это классический, разработанный сразу после первых безэкранных версий, можно сказать - проверенный временем контроллер!
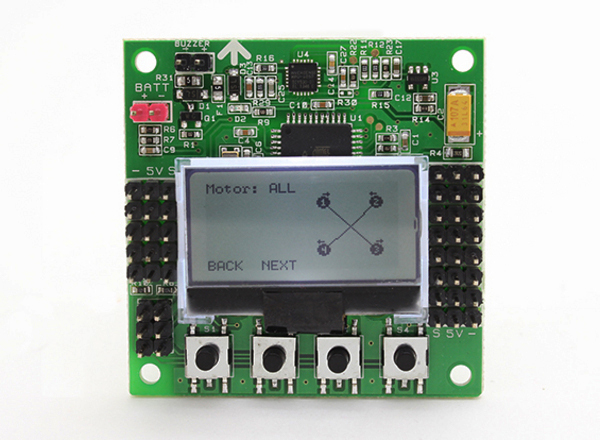
KK2.1 Multirotor LCD Flight Controller With Atmega324 PA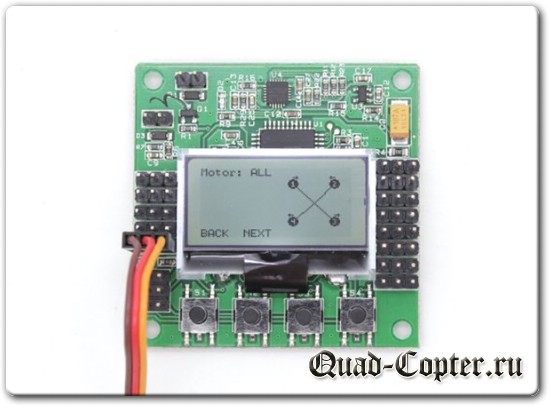
Ставший классикой контроллер мультикоптера KK2.1 Multirotor LCD на чипе Atmega324 PA прост в настройке и хорошо удерживает летательный аппарат в полете.
Я не буду расписывать достоинства и возможности данной платы, по сути все три контроллера описанные в этой статье имеют абсолютно одинаковые возможности и прошиваются одной и той же прошивкой. Лучше посмотрите видео применения этих контроллеров в конце статьи.
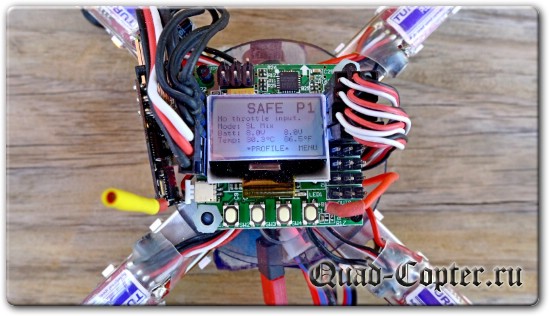
Купить KK2.1 Multirotor LCD Flight Controller With Atmega324 PA можно тут .Хотя, среди пилотов квадрокоптеров сложилось мнение, что KK серия - это игрушка не заслуживающая внимания, это не так. Посмотрите на фотографию ниже.
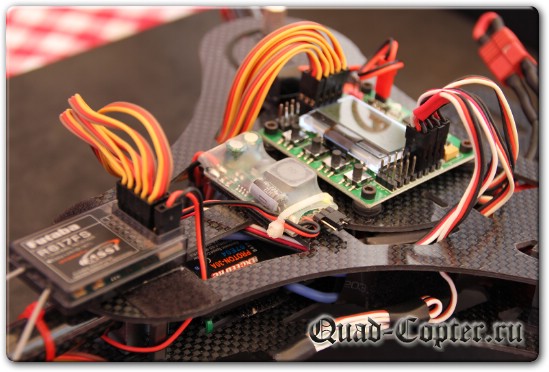
Зарубежные любители мультироторных аппаратов вполне себе устанавливают KK2.1 Multirotor LCD на карбоновые рамы, где один луч стоит больше, чем контроллер.
Вот демонстрация возможностей точного управления квадрокоптером на базе контроллера KK2.1 Multirotor LCD.
Ну как? Достаточно для полетов. )
А вот показывается возможность балансировки квадрокоптера на KK контроллере после броска.
Еще одно видео заинтересует тех, кто любит экзотику.
Этот TwinCopter сделан из летающей игрушки Walkera Pandora, при этом убраны дурацкие "лепестки" расположенные в оригинальной игрушке под моторами, они очень сильно портили вид летательного аппарата и из за них терялось соответствие с оригиналом из фильма Аватар.
Вот в общем то и все! Удачной покупки и полетов!
Похожие статьи:

















Прошивка с использованием закомментированного кода программы авто-выравнивания (использовать на свой страх и риск!) - для оценки угла наклона используется информация и с акселерометра, и с гироскопа. [1] По отзывам авто-выравнивание с такой прошивкой работает гораздо лучше. Но при превышении углов крена/тангажа примерно более 26° происходило "залипание" углов в памяти контроллера и если после этого включался авто-уровень то коптер начинал заваливаться на эти неверные углы. Лечилось это только переподключением питания.
Видео с демонстрацией авто-выравнивания по горизонту со старой и улучшенной прошивкой.
Стабилизация подвеса камеры [править ]Работает с прошивкой начиная с версии 1.5 и только при включенных моторах.
Сервомашинки подвеса подключаются к выходам #7 и #8 (Roll-крен и pitch-тангаж соответственно). Чтобы сервомашинки были обеспечены питанием, проще всего подать его с внешнего BEC (например одного из контроллеров моторов, либо с отдельного) на любой из выходов #2..#8.
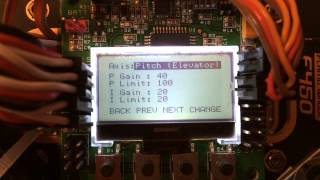
Сонар: контроль высоты [править ] Настройка PID [править ]Перед началом настройки полезно ознакомиться с теорией настройки PID.
Установите такие значения P для gain и limit:
Roll/Pitch P-gain: 30 (для маленьких коптеров
25 см установите значение 20) Roll/Pitch P-limit: 100 Roll/Pitch I-gain: 0 Roll/Pitch I-limit: 20 Yaw P-gain: 50 Yaw P-limit: 20 Yaw I-gain: 0 Yaw I-limit: 10
Далее, увеличивайте значение Roll/Pitch P-gain с шагом 10 (или 3..5 для маленьких коптеров), и каждый раз проверяйте реакцию коптера на ваши действия стиком крена/тангажа, а также на внешние воздействия. В процессе увеличения P-gain может происходить следующее:
Нужно подобрать такое максимальное значение P-gain, когда не наблюдается таких явлений.
Настройка I-gain для Roll/Pitch [править ]Зависните коптером, затем сделайте резкий рывок вперёд и бросьте стик управления. Если коптер продолжает движение, надо увеличивать I-gain, пока коптер не начнёт быстро восстанавливать своё положение.
Как вариант, можно задать I-gain в размере 50-100% от значения P-gain для облегчения выполнения акробатических трюков.
Настройка Yaw P/I-gain [править ]Увеличивайте значение Yaw P-gain с шагом 10 (или 3..5 для маленьких коптеров), и каждый раз проверяйте реакцию коптера на ваши действия стиком управления курсом (по рудеру) в пределах +/-90° от начального положения. В процессе увеличения Yaw P-gain коптер может вращаться или останавливаться быстрее чем нужно, или в процессе вращения он может неожиданно набирать высоту или опускаться. Нужно найти такое оптимально значение Yaw P-gain при котором вращение коптера стабильное, предсказуемое, и не происходит резкого изменения высоты полёта.
Как вариант, для Yaw P-gain можно взять значение Roll/Pitch P-gain.
Значение Yaw I-gain настраивается аналогично. Также вы можете попробовать в полёте покрутить коптер рукой вокруг вертикальной оси. Если он не возвращается, пробуйте уменьшать Yaw I-gain.
В общем случае рекомендуется не устанавливать слишком большие значения для P/I-gain, иначе могут возникать паразитные вибрации, осцилляции (раскачивания), или полная потеря конроля над коптером.
Параметры limit ограничивают мощность моторов, которая может быть использована для стабилизации gain -параметрами. Значение 100 соответствует 100% мощности. Параметры I-limit имеют большое значение в настройке коптера для полётов в ветер.
Очень важно правильно настроить limit для Yaw P/I. Если установить слишком большое значение limit для Yaw, то может так получиться, что будет задействовано слишком много мощности для стабилизации по вертикальной оси, то есть по рудеру, а для стабилизации по крену/тангажу (которая наиболее важна) мощности уже не хватит. Поэтому по умолчанию установлено 30% (P-limit=20 + I-limit=10) для Yaw, оставляя 70% на крен/тангаж.
Yaw P-limit можно увеличить для более резкого управления по рудеру, но нужно иметь ввиду, что у каждого аппарата есть физический предел маневрирования.
См. также [править ]Видео: KK2.0 квадрик + LEGO мотоцикл. в котором очень подробно показан процесс PI-настройки.
Как добиться стабильного висения? [править ]В версиях прошивки выше 1.2 самолетные режимы отсутствуют. Для самолетов есть спец. прошивка.
Для того чтобы плата правильно работала в самолётном режиме, нужно подключить контроллер мотора с BEC к порту М1, по тому что по умолчанию именно этот порт управляет мотором. Но от этого порта будет питаться только сама плата стабилизации и подключенный к ней приемник радиоуправления, который мы включаем в порты с AIL по AUX. А поключенные сервомашинки к портам с М2 по М8 запитываться не будут. Для того чтобы ваши сервомашинки зашевелились нужно к одному из этих свободных портов(например М8) подключить отдельный BEC или просто подать питание 5В на красный(+) провод.
Сигнализация о разряде АКБ [править ]

подпайка провода для сигнализации о разряде АКБ
Для использования этой функции нужно подпаять провод (не понятно почему китайцы сразу туда штырек не впаяли) от «+» АКБ, как на фото, и настроить в меню напряжение отсечки. «-» АКБ должен быть соединён с контактом «земля» выхода #1 платы.
В меню "Misc. Settings", "Alarm 1/10 volts" число 105 означает начало звуковой сигнализации при напряжении на АКБ 10.5 В, и далее по аналогии.
Видео [править ] Полезное [править ]Эта предустановка не подойдёт, но вы можете использовать микшер для настройки под вертолёт так, что KK2.0 будет работать как FBL-контроллер!
Доступно ли автовыравнивание по горизонту в самолётных режимах, или это работает только для котперов? [править ]В принципе это должно работать и для самолётов, но пока нет никаких отзывов на этот счёт. Если вы уже пробовали, напишите здесь об этом.
Гироскоп может работать со скоростью 2000 °/с, почему не используется эта возможность? [править ]440 °/с даёт большее разрешение. Но вы можете получить и 2000 °/с. Для этого вам нужно найти на плате три группы по три контакта, они расположены в одну линию под двумя чёрными чипам, если смотреть на плату сверху. Каждая группа отвечает за (слева направо) оси X, Y, Z. Разомкните цепь между центральным и одним из контактов и замкните противоположный контакт с центральным с помощью тонкой проволочки - вы получите 2000 °/с. Будьте внимательны: не замкните эти контакты с дорожками, проходящими между ними.
Сколько каналов нужно иметь на передатчике радиоаппаратуры. чтобы управлять коптером? [править ]Минимально достаточно 4 канала, но если вы захотите воспользоваться функцией авто-выравнивания по горизонту, то вам придётся включать/выключать его между полётами по LCD-экрану. Поэтому будет здорово, если у вас в передатчике найдётся 5-й канал, чтобы вы могли включать/выключать авто-выравнивание во время полёта.
При выборе конфигурации «Трикоптер» в разделе Motor Layout показывается, что все моторы должны вращаться в одну сторону [править ]Для трикоптера может быть использована любая комбинация направлений вращения пропеллеров. Но лучше, если один из пропеллеров будет вращаться в противоположную сторону относительно двух других.
Я нечаянно настроил контрастность экрана так, что теперь ничего не видно. [править ]Выключите платку, и включите её снова. Далее, действуйте так:
нажмите кнопку 4 нажмите кнопку 3 четыре раза нажмите кнопку 4 нажмите кнопку 3 нажмите кнопку 4 нажмите кнопку 1 нажмите кнопку 3 тридцать шесть раз нажмите кнопку 4
Как работать с платой, если сломался LCD-экран? [править ]Товарищ Steveis позаботился об этом: маленькая программа для настройки основных параметров. Работает с прошивками 1.2x.
При арминге начинает пищалка срабатывать, пикает с интервалом в 1 сек [править ]Вольтаж буззера уменьшите до 0 - перестанет пищать.
Потерялась пищалка, чем заменить? [править ]Нужна с генератором, на 5В. Например, 1205FXP.
Мнения [править ]
Распиновка порта ISP для перепрошивки
Внимание! После перепрошивки рекомендуется сделать reset (полный сброс) платы, после чего настроить всё заново.
Все комплектующие для коптеров можно найти тут – ссылка
Есть много мелочей, которые не выставлены на аукционе. Спрашивайте в личке.
_________________________________________________________________
Полетный контроллер KK2.0 Multi-Rotor. Летает из коробки
Вниманию новичков! Если вы вдруг заблудились в настройках контроллера, всегда есть возможность сбросить настройки к заводским!
Плата распределения питания в подарок!
Следующий шаг в развитии полётных контроллеров для мультикоптеров! KK-mini использует все возможности КК-контроллеров, но размещается на совсем небольшой платке.
Пусть небольшой размер не вводит вас в заблуждение. KK-Mini основан на архитектуре контроллера KK2.1.5 и имеет одинаковый с ним набор входов и выходов, и тот же набор функций, в том числе - LCD-экран с чётким изображением и 4 кнопки для управления настройками. Но размер 36мм позволяет комфортно размещать платку на популярных рамах для мини-коптеров.
В контроллере «прошито» большое количество предустановок для различных летательных аппаратов. Так что достаточно выбрать подходящий из них, проверить правильность вращения моторов и установки винтов на них, откалибровать регуляторы, настроить радиоаппаратуру - и можно отправляться в полёт. Если и это вам покажется непростым, тогда просто следуйте подсказкам на экране!
Система датчиков включает в себя сверхчувствительный 6050 MPU, который делает полёт аппарата с этим контроллером потрясающе стабильным. А сердцем контроллера является 8-разрядный чип Atmel Mega644PA с AVR RISC-архитектурой и 64 Кбайт памяти. На плате уже присутствует защита от переполюсовки и контроль напряжения, так что не понадобится ничего паять для этого. Добавлена также функция звукового предупреждения при включении и отключении платы.
Инструкция на русском языке http://www.hobbyking.com/hobbyking/store/uploads/1066059837X652129X19.pdf
Если вы новичок в мире мультикоптеров или просто не получалось нормально настроить предыдущие версии KK-контроллеров, то KK-Mini просто создан для вас. А стандартный 6-пиновый AVR-интерфейс для USBasp-программатора позволит легко обновить «прошивку» контроллера.
Характеристики:
Размеры: 36x36x11.5мм (крепёжные отверстия 30.5x30.5мм)
Вес: 8.6 г
Микроконтроллер: Atmega644 PA
Датчики: 6050MPU InvenSense Inc.
Auto-level: Есть
Напряжение питания: 4.8-6.0V
AVR-интерфейс: стандартный 6-пиновый
Сигнал от приёмника: 1520мкс (5 каналов)
Сигнал на регуляторы: 1520мкс
LCD-экран: 24х18мм
Кнопки управления: 3.3х4.2мм (4 шт.)
Контроль напряжения: Спец. контакт, отмеченный красным
Входные разъёмы: Одноконтактные в ряд с шагом 2.54мм
Прошивка 1.6:
с предустановленными конфигурациями
Бикоптер
Трикоптер
Квадрокоптеры +, X
Гексакоптеры +, X, Y6, H6
Октокоптеры +, X, +8, X8, H8, V8, V6
Самолёт с 1 сервомашинкой на элерон
Самолёт с 2 сервомашинками на элерон
Летающее крыло
Монокоптер 2 мотора, 2 сервомашинки
Монокоптер 1 мотор, 4 сервомашинки
Раздел настроек "Mixer Editor" позволяет гибко настроить каким образом подавать сигнал на регуляторы (моторы) и/или сервомашинки в зависимости от управляющих сигналов с радиоаппаратуры. Всего поддерживается 8 выходных каналов.
Возможно подключение всех каналов некоторых приёмников одним проводом к каналу газа:
- Сателлит DSM2/DSMJ через специальный адаптер DSM-CPPM.
- Поддерживающие шину SBUS через специальный адаптер SBUS-CPPM.
** Замечание: Рекомендуется перед использованием по возможности обновить прошивку на более новую.
*** Замечание: На KK-Mini можно использовать те же прошивки, что и для плат версий KK2.1. 2.1.5..
ПЯМЯТКА для НОВИЧКОВ
Посмотрели множество шикарных видео и. решились собрать свой первый квадрокоптер!
Что нужно для сборки своего первого квадрокоптера? Разбираемся ниже.
Рама – лучший размер для начала 330-360 мм. Потом вы сами определитесь, в какую сторону двигаться: в сторону маленьких квадриков для гонок и FPV или в сторону вальяжных монстров для видеосъемки.
Мотор – чем меньше размер рамы, тем более оборотистые нужны двигатели. В маркировке двигателя первые две цифры – диаметр статора, следующие две – высота магнитов. Например 2208 – диаметр статора 22 мм, высота магнитов – 8 мм. Обороты 920 kv означают увеличение числа оборотов двигателя, при увеличении питания на один вольт.
Регуляторы (ESC) – можно подбирать под мощность двигателя, а можно взять с запасом мощности (что для новичка более предпочтительно).
Контроллер полетов – тут выбор достаточно широк, но начинать лучше с простых по настройке, но с богатым функционалом (CC3D, Atom, KK-mini), когда разберетесь, для вас откроется уже широкий спектр более дорогих плат.
Пропеллеры – чем меньше размер рамы и более оборотистый двигатель, тем размер пропеллера меньше (например 5030 для 250 мм рамы) и наоборот. В названии пропеллера первые две цифры обозначают длину в дюймах, две последующие – шаг на один оборот.
Батарея – очень важный элемент конструкции. Выбирать надо по размерам и весу. Для большинства квадрокоптеров используют аккумуляторы из трех элементов с общим напряжением 11,1 вольт. Это обозначается как 3S. В параметрах батареи указывается номинальный ток разряда. Оптимальный ток разряда батареи для квадрика 20-30С.
Плата распределения питания – предназначена для удобства монтажа электрических соединений на раме квадрика.
Передатчик (аппаратура) – предназначен для управления квадрокоптером. Для управления простым квадриком, достаточно 4-х каналов. Но очень быстро 4-х каналов станет мало. Поэтому сразу стоит задуматься о 6-и и даже 9-и канальном передатчике.
Все необходимое можно найти в моих лотах тут ссылка. Если есть большое желание летать, в подарок большая скидка на комплекты!
Все для сборки – квадрокоптер
Квадрокоптеры в Красноярске
Ремонт, Консультации, Помощь
Допускаю обоснованные скидки – предлагайте.
Время передачи лота по договорённости. Предварительно позвоните.
В центре: Мира-Декабристов.
Невыкупленный в течении трех дней лот выставляется на торги заново.
Куплю б/у комплектующие для квадрокоптеров.
**************
Гарантированно доставлю любые комплектующие с AliExpress по цене продавца.
**************
До 30 декабря предновогодние скидки всем, кто попросит, на все 10%, на некоторые лоты до 30%!Спрашивайте.
С наступающим Новым годом!