.jpg)
.jpg)

.jpg)
.jpg)



Категория: Инструкции
Walkera QR X350 PRO в комплектации FPV1 - квадрокоптер с GPS и датчиком высоты. В комплект поставки входит аппаратура управления DEVO F7, подвес G-2D и видеопередатчик. Возможна установка камеры GoPro.
Walkera QR X350 PRO - это новая версия квадрокоптера Walkera QR X350. Основное отличие - полетный контроллер DEVO-M, который сделан на базе ArduPilot. DEVO-M, при желании, можно перепрошить и получить целый ряд новых возможностей. Например телеметрию и Mission Planner.
FPV (first person view) - возможность наблюдать видео с борта квадрокоптера в режиме реального времени.
Комплектации:Примечание: подвес без установленной камеры не работает

.jpg)























Кому интересно привожу свои настройки по переназначению переключателей на пульта Devo-F7 под себя.
Ничего в инете не нашел, т.к. все хают "Прошку". Сразу приемники и передатчики меняют по советам интернет-форумчан, что-то добавляют, что-то урезают и т.п. Лично мне квадрокоптер понравился, менять пока ничего не собираюсь, только попробую другие режимы полета.
Итак, имеем Walkera QR X350PRO/ DEVO F7 / RX703A / G-2D iLook (контроллер подвеса не работает и не используется, только вкл/выкл камеры на запись, такой достался)
Подключения
На приемнике:
data bus -> DEVO M data bus
AUX 1 -> Camera controller
Gear switch: не используется
AUX 2 knob: не используется
FMOD switch: Переключает режимы полетов с 1-3
Mix switch: Переключает режимы полетов с 4-5
D/R switch: Можно установить режим AUTO на 7 канале в МП или вкл/выкл запись камеры.
Hold switch Throttle hold (50%)
параметры на DEVO F7
Model Menu > Device Select > Flight switch: Inhibit
Model Menu > Device Select > Flight mode trim: Common
Model Menu > Device Select > Thro Hold Switch: HOLD SW
Model Menu > Device Output > Gear: -> MIX SW, Active (это 5 канал приемника идет на data bus)
Model Menu > Device Output > Flap: -> D/R SW, Active (это 6 канал приемника идет на AUX 1)
Model Menu > Device Output > AUX2: -> FMOD SW, Active (это 7 канал приемника идет на AUX2)
Function Menu > Travel Adjust > Gear: +33 / -90
Function Menu > Sub Trim > Gear: 11
Function Menu > Program Mix 1
TYPE: Normal
ALL SERVOS HOLD: Ok
MASTER: AUX2
SLAVE: GEAR
POS 0 UP< >: 30
POS 0 DN<->: 0
POS 1 UP< >: 0
POS 1 DN<->: 0
OFFSET: -100
THROTTLE STICK: Inhibit
Switch: Pos 0
Получилось следующая комбинация:
MIX SW + FMODE SW Flight Mode PWM
0 0 1 Stabilize 1192
0 1 2 Loiter 1300
0 2 3 AltHold 1408
1 0 4 AltHold 1552
2 0 5 Circle 1684
2 2 6 RTL 1763
На 3 и 4 каналах другие режимы полета не выставляются кроме как AltHold, видимо это так задумано производителем. Летал пока немного, в основном на работе на подстанции 220 кВт, под проводами, боюсь далеко и высоко улетать. Пока опробовал Loiter и AltHold - изумительно. Жаль, что подвес не работает, снимать надо в ровном полете, тогда ничего получается. Дальнейшем планирую по маршруту.
Квадрокоптер Walkera QR X350 PRO это улучшенная версия модели Walkera QR X350. Последняя, можно сказать, большая революция сверх малой беспилотной авиации. Фирма Walkera взяв очень удачную модель квадрокоптера. смогла значительно ее улучшить.
Как и QR X350, модель с приставкой PRO очень «дружелюбна» к пользователю. Для управления данным квадрокоптером и его эксплуатации необходим совершенно небольшой опыт. После извлечения из коробки тотчас готов летать, только предварительно надо зарядить аккумуляторы.

По сравнению с предыдущей моделью, Walkera QR X350 PRO имеет на порядок больше режимов полета. Для этого осуществляется прошивка контроллера DEVO-M до возможностей полётного контроллера ArduPilot. Данный контроллер лежим в основе DEVO-M примененном в Walkera QR X350 PRO. Учитывая этот факт, прошивку владелец может выполнить самостоятельно.

У квадрокоптера с коробки, полетный контроллер дает возможность воспользоваться четырьмя разными режимами. Стандартная прошивка контроллера дает возможность возврата Walkera QR X350 PRO в точку взлета, зависание в указанной точке с помощью GPS. гиросокопа. датчика высоты, свободный полет и естественно режим обычного полета.
Покупателю предлагаются квадрокоптеры Walkera QR X350 PRO в таких комплектациях.
- BNF. Бюджетный вариант. Оптимально подойдет для тех, кому нужен только квадрокоптер.
- Basic. Идеальный вариант для новичков. Все необходимое для эксплуатации входит в комплектацию.
- FPV1. Комплектация аналогична предыдущей, за исключением передатчика DEVO F7, снабженного экраном и видеопередатчика.
-FPV2. Комплектация аналогична предыдущей, добавлена камера Walkera iLook.
-WiFi. Комплектация куда входит передатчик DEVO 10 и WiFi-ретраслятор.
При использовании штанных аккумуляторов емкостью 5,2 А/ч, максимальное время полета квадрокоптера с камерой составит 18 минут. Есть возможность установки аккумулятора емкостью 6,6 А/часов, что дает время полете квадрокоптера 24 минуты. Есть система защищающая аккумуляторы от понижения напряжения. Максимальная высота полета увеличена до 1,8 км.
Квадрокоптер Walkera X350 PRO снова нарушает правила и предлагает невероятный функционал за свою цену. Это полноценные 25 минут полета с видео или FPV. Новые контроллеры для полета DEVO-М способны обеспечить еще большую стабильность модели и удержание позиций с GPS, а также оперативный возврат модели к точке взлета. Простое подключение к бесколлекторному подвесу Walkera G-2D открывает невероятные возможности. И это еще не все.
Особенности нового QR x350
Модель продается в собранном виде, она полностью готова к полету. Сразу после покупки вы можете опробовать свое приобретение. Прочный пластик корпуса обеспечит вам длительную эксплуатацию W alkera 350 без трещин, царапин и неприглядных потертостей. Яркие светодиодные огоньки красного и зеленого цвета помогут вам идентифицировать свой квадрокоптер в темноте.
Уникальная автономность QR x350
Коптер walkera qr x350 pro удивляет своей автономностью. Теперь ролики, снятые с воздуха будут достигать 25 минут без всевозможных дополнительных установок. Это превосходный результат, учитывая, что предыдущая модель радовала своих владельцев 7, а то и 5 минутами полета. Обновленная батарея может похвастать удвоенной емкостью, достигающей 5200 А/ч. Напряжение, которое способен создать аккумулятор, равно 11,1 Вольт, а разряд - 10 С, чего вполне достаточно для работы двигателей каптера.
Вся электронная начинка мультикоптера W alkera включает в себя 4 бесколлекторных двигателя WK-WS-28-008C, и, соответственно, 4 регулятора скорости WST-15A(G/R), которые позволят дать волю творческому началу вашей личности во время съемок. Приемник DEVO-RX703, бесколлекторный подвес Walkera G-2D. GPS приемник и камера Walkera iLook обеспечит возможность самых разнообразных съемок с воздуха и их передачу, а WiFi ретранслятор передаст информацию на ваш смартфон или планшет. Коптер W alkera qr x350 купить. значит обеспечить себя интересным и полезным досугом.

Система управления QR x350
Система управления W alkera qr x350 pro fpv также подверглась некоторым доработкам. Теперь радиус полета достигает двух километров, при этом сигнал для передачи видео будет не больше одного километра. Ручной режим полета будет отличным вариантом для спортивных соревнований, в которых участвуют профессиональные поклонники квадрокоптеров.
С помощью компьютера можно запрограммировать точку возврата и маршрут полета модели. Для новичков квадрокоптер walkera qr x350 теперь имеет кнопку "Домой", которую можно использовать, если ваш коптер сбился с заданного курса. При потере сигнала модель самостоятельно вернется в точку запуска.

При покупке будьте внимательны и правильно выбирайте комплектацию, которых всего бывает шесть. Самая дешевая из которых, BNF включает в себя только квадрокоптер и его запасные пропеллеры. Она станет отличной экономией для тех, кто дополнительные аксессуары уже приобрел. Остальные комплектации различаются техническим оснащением, и самая дорогая не только имеет в своем комплекте все предлагаемые компанией аксессуары, но и передатчик, который позволит иметь всю необходимую информацию сразу в смартфоне или на планшете.

Бренд Walkera предложил покупателям свою новую разработку бюджетной версии DJI Phantom 2 Vision. квадрокоптер Walkera QR X350. Внешне модель мало чем отличается от «старшего брата», естественно, если не учитывать более низкую цену.
Рассуждать о характеристиках FPV и технических качествах модели пока несколько рано. Еще слишком небольшое количество пользователей успело воспользоваться этим аналогом DJI Phantom 2. Но уже можно высказать свое мнение о реализации некоторых технических моментов в новинке.
В первую очередь, стоит отметить, что компания все-таки прислушалась к просьбам радиолюбителей и не стала, как в прежних версиях, интегрировать приемник на плате полетного контроллера. Это дает возможность для подключения своего пульта DEVO F7 .
Вторая особенность состоит в том, что новый квадрокоптер с FPV имеет четыре отдельных регулятора вместо одного интегрированного, и они разнесены аналогично Phantom Vision, который выпускает компания DJI.
Х350 также как и «Фантом» оборудован закрепленным на шасси компасом и антенной GPS. Но бюджетная модель отличается от продукта DJI тем, что ее мозг, основной бортовой контроллер, способен поддерживать исключительно четырехмоторный вариант конфигурации.
Компания Walkera выпустила бюджетный квадрокоптет Walkera QR X350 в 3-х базовых модификация:
1. Базовая модификация - управление осуществляется через входящий в комплект пульт DEVO 7. При желании управление возмжно с помощью смартфонов/планшетников на базе операционных систем Andoid И iOS.
2. FPV модификация - в комплект входит пульт DEVO F7, который дает возможность наблюдать видео с борта квадрокоптера в режиме реального времени на пульте.
3. FPV + Telemetry модификация - в комплект вместо пульта DEVO F7 входит пульт DEVO F7DS, что позволяет в дополнии к видео картинке с камеры на борту квадрокоптера получать информацию по телеметрии (заряд батареи, высота полета), когда Ваш квадрик в воздухе.
При разработке полётного контроллера DEVO-M в компании Walkera воспользовались открытым проектом ArduPilot. Недокументированные способности Walkera DEVO-M были обнаружены NARAJANA при экспериментах со скоростью подключения в Mission Planner [4] [5] [6].
Что и как реализовано производителем:
Но можно через SPI прошить контроллер DEVO-M стандартной прошивкой ArduPilot для получения полного набора функций автопилота.
Что (не)может DEVO-M [править ]Изначально в QR X350 PRO доступны только четыре режима полета ArduPilot.
Какие полётные режимы можно реализовать:
Также по умолчанию отключена полезная функция Geo Fence. виртуальный забор, коптер возвращается в точку взлёта если он улетает слишком высоко или далеко.
И отсечка установлена на 10,7В, что не позволяет использовать полную ёмкость аккумулятора, это тоже можно изменить.
Настройка ArduPilot [править ]Всё, что описано, вы делаете на свой страх и риск. За последствия никто ответственности не несёт.
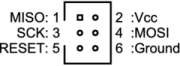
Для того, чтобы задействовать почти все функции ArduPilot нам нужна программа настройки MissionPlanner. Качаем тут. Шнурок для подключения есть в комплекте QR X350 PRO.
Внимание! Не подключайте USB вместе с батареей, если не уверены в исправности коптера. При неисправности питания можно пожечь USB порт.
Внимание! Для настройки DEVO-M желательно пользоваться Mission Planner версии не новее 1.3.28, т.к. в более новых вырезана часть функций. Например, очень нужной для Walkera QR X350 PRO функции FS_GPS_Enable в свежих версиях нет.
Внимание! После подключения к MissionPlanner желательно не пользоваться Wizard и консольным терминалом без предварительного ознакомления с руководством по Arducopter. Если у вас прошивка 1.0, то лучше ее оставить как есть [8] [9]. Обязательно нужно сразу сделать копию настроек (видео ). Номер прошивки проверяется оригинальной програмой SerialAngel.exe из любого архива прошивки. Чтобы в MissionPlanner появился пункт Full Parameters List, нужно активировать чекбокс Advanced Menu.
Полезные параметры [править ]См. также полный список параметров MissionPlanner. а здесь перечислены только те, по которым есть замечания.


Настройка параметра FS_GPS_ENABLE
[19] Теперь можно прошивать Ардукоптер с помощью штатной программы SerialAngel, предварительно сконвертировав из HEX в бинарный формат и зашифровав "валкеровским" способом. При этом всегда можно откатиться на нативную прошивку.
Программы-планировщики [править ]
Android-устройство должно иметь OTG для поддержки функции USB-host и версию операционной системы Android не ниже 4.
Bluetooth-модем [править ]Возможно установить в QR X350 PRO bluetooth-модем и обходиться без подключения к компьютеру проводом. Это понадобится также для управления квадрокоптером с Android-устройства.
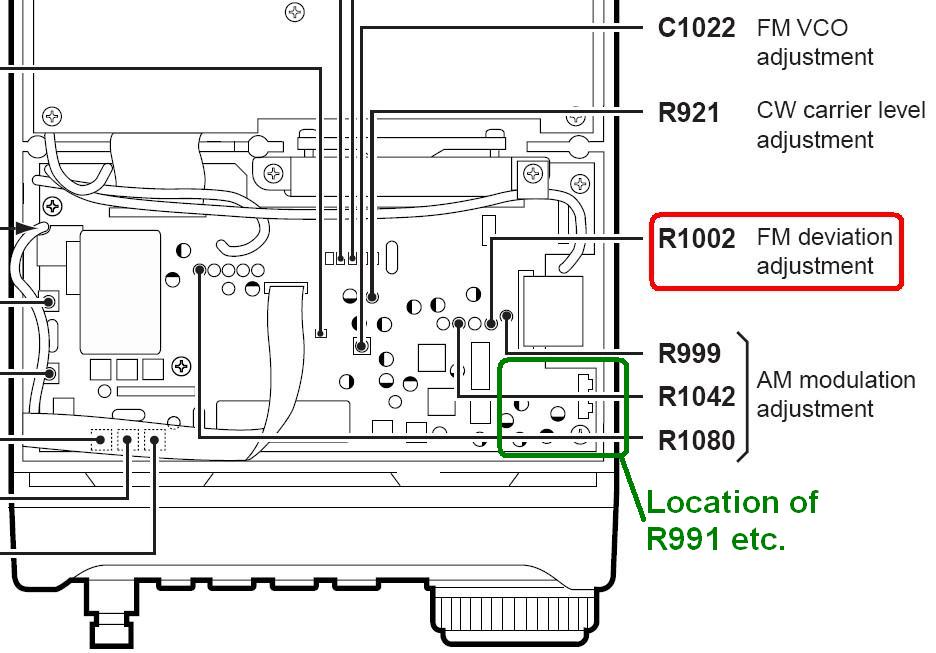
Модем можно использовать, например, такой. В данном случае надо перепаять на плате полётного контроллера DEVO-M два резистора, чтобы понизить напряжение сигнала с 5в до 3,3в. Перед подключением необходимо понизить скорость порта модуля BT до 57600, например при помощи программы Termite.
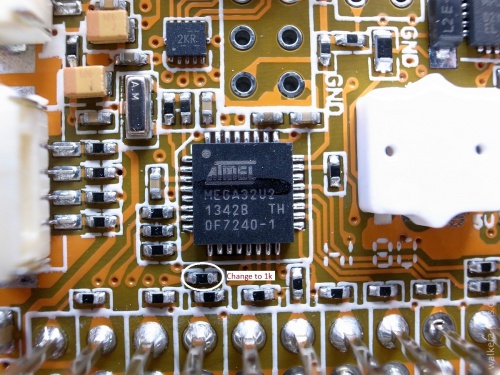
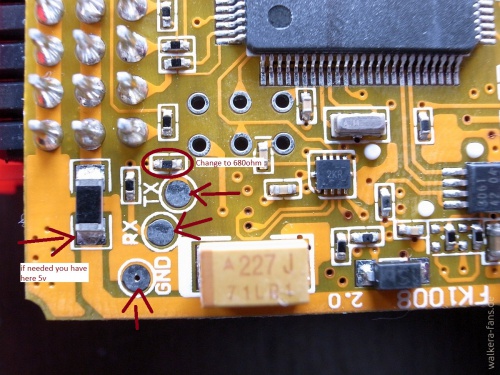
На фотографии показаны контакты, к которым нужно подсоединять bluetooth-модем. Кстати, при использовании 3DR-радиомодема или OSD - их подсоединять нужно к этим же контактам. Большая благодарность NARAJANA за идею с этой полезной доработкой!
Подключение OSD [править ]
Подключение OSD к контроллеру Walkera Devo-M .
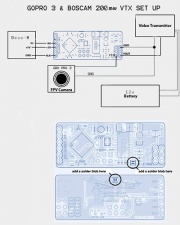
Схема подключения OSD без использования напряжения 12V.
Модуль OSD позволяет замешивать поток телеметрической информации о полете в канал видеоизображения камеры установленной на коптере. Передаваться может информация о полетном режиме, скорости, высоте полета, горизонте, напряжении батареи и других параметрах в зависимости от настроек модуля OSD.
В отличие от OSD, модуль радиомодема 3DR позволяет осуществить двусторонний обмен информацией на значительном расстоянии при помощи управляющих программ Mission Planner и Droid Planner. Он не исключает использование OSD, а вместе они открывают много полезных возможностей по управлению коптером: значительно удобнее калибровать компас. работать с программой Mission Planner и даже находить улетевший аппарат.
При вертикально ориентированных антеннах на земле и на борту он обеспечивает связь на расстоянии от 600 до 800 метров. Необходимо помнить, что RSSI в данном случае будет отображать не качество канала радиоуправления, а качество связи между модемами.
Увы, но прошивка Arducopter 3.2devo=1.0 не позволяет просмотреть логи. В МиссионПланнере чтение логов можно включить, но скачать их для просмотра не получается, их в ПолетномКонтроллере нет [24].
Какую частоту выбрать? [править ]
Подключение OSD одновременно с 3DR или ВТ к контроллеру DEVO-M [1]. На контроллере обязательно меняются два резистора для согласования уровней. RX модема и OSD подключается на контакт DEVO-M с обозначением RX. TX модема подключается на контакт DEVO-M с обозначением TX.
Только для справки! Подключение OSD и модуля телеметрии 3DR к APM. Подходит для модема с AliExpress [3]
Советы [править ]Настройка: Function menu->Throttle Curve->Position=Pos 1, Point=Point-L, Output=20.0, Switch->Hold SW=1.
Настройка: Model Menu->Device select->Thro Hold Switch=D/R SW. Function menu->Throttle Hold->Hold Status=Active, Hold Position=50.0.
Настройка: Function Menu->Program mix->Program mix1->Normal Ставим ok. Мaster ставим GEAR, Slave ставим GEAR, Pos 0 <-> ставим -40/ Switch -> FMOD SW 0 = 1. Далее два раза Ext и пролистываем кнопкой DN- на пульте до появления Program mix2 (будем настраивать второй мix) —> NORMAL ставим ok/ Мaster ставим GEAR->Slave ставим GEAR, POS 1 <-> ставим -30/ Switch -> FMOD SW 2 =1. Выходим из меню. Затем: Function Menu->Sub Trim->Gear cтавим 8,0 и выходим из меню. Затем: Function Menu->Travel Adjust->Gear нижнюю -100 меняем на -110 Выходим из меню.
После монитора заходим в Mission Planner, калибруем по новой GEAR и проверяем, что режимы переключаются и настраиваем по желанию. Логичным будет поставить на FMODE режимы AltHold и Loiter. поскольку это два режима удержания, а на MIX: Stab, Land и RTL. поскольку Land — это управляемая посадка, а RTL — автоматическая. Теперь можно использовать переключатель Gear для вкл/выкл камеры на запись вместо режима Simple Mode на Ch7. Кстати, не выходя из монитора, рекомендуется проверить каналы по стикам и выставить цифровыми триммерами в нули, а для газа L100. (Альтернативный вариант микширования [30] )
Прошивки [править ]Все свежие прошивки для контроллера DEVO-M расположены на сайте производителя. В архивном файле находится сама .bin прошивка, инструкция .pdf и оригинальная программа SerialAngel.exe при помощи которой можно узнать номер Вашей прошивки.
После перепрошивки обязательно нужно откалибровать компас. Иначе возможно нестабильное поведение коптера воздухе. К сожалению, перепрошивка не помогает восстановить параметры по умолчанию. При перепрошивке устанавливаются только те параметры, которые явно поменяли разработчики. Но восстановить настройки по умолчанию возможно с помощью этих файлов:
Файлы настроек нужно загружать через программу MissionPlanner. Загрузить - "Load", после загрузки файла обязательно нужно нажать "Write params", чтобы настройки прописались в полётном контроллере. Подробнее о настройках в разделе Настройка ArduPilot.
Внимание! Категорически НЕ рекомендуется пользоваться консольным терминалом MissionPlanner для настройки DEVO-M, а также в терминале использовать команду setuр erase — эта команда затирает настройки конфигурации прошивки в EEPROM микросхемы Аtmel 2560 с последующей невозможностью сохранения .param по кнопке WriteParams и контроллер превращается в 'кирпич' [34]. Для исправления ошибки необходимо загрузить в контроллер файл конфигурации 4kb через закладку Config/Download оригинальной программы SerialAngel.exe [35].
Примечание: При возврате со старших версий на 1.0 показывает предыдущий номер прошивки, например 1.1, хотя внутри она уже 1.0. Исправить можно загрузкой файла конфигурации 4kb.
FAQ [править ] Можно ли использовать карты без интернета [править ]В окне планирования миссии правой кнопкой мыши по карте - Map Tool - Prefetch.
При пользовании Droidplanner на планшете/смартфоне через 3DRradio.
Не видит точку "Дом" программа МП, надо подключить коптер, пропишется последняя точка дома.
Чем полетный контроллер DEVO-M отличается в лучшую сторону от ArduPilot [править ]